




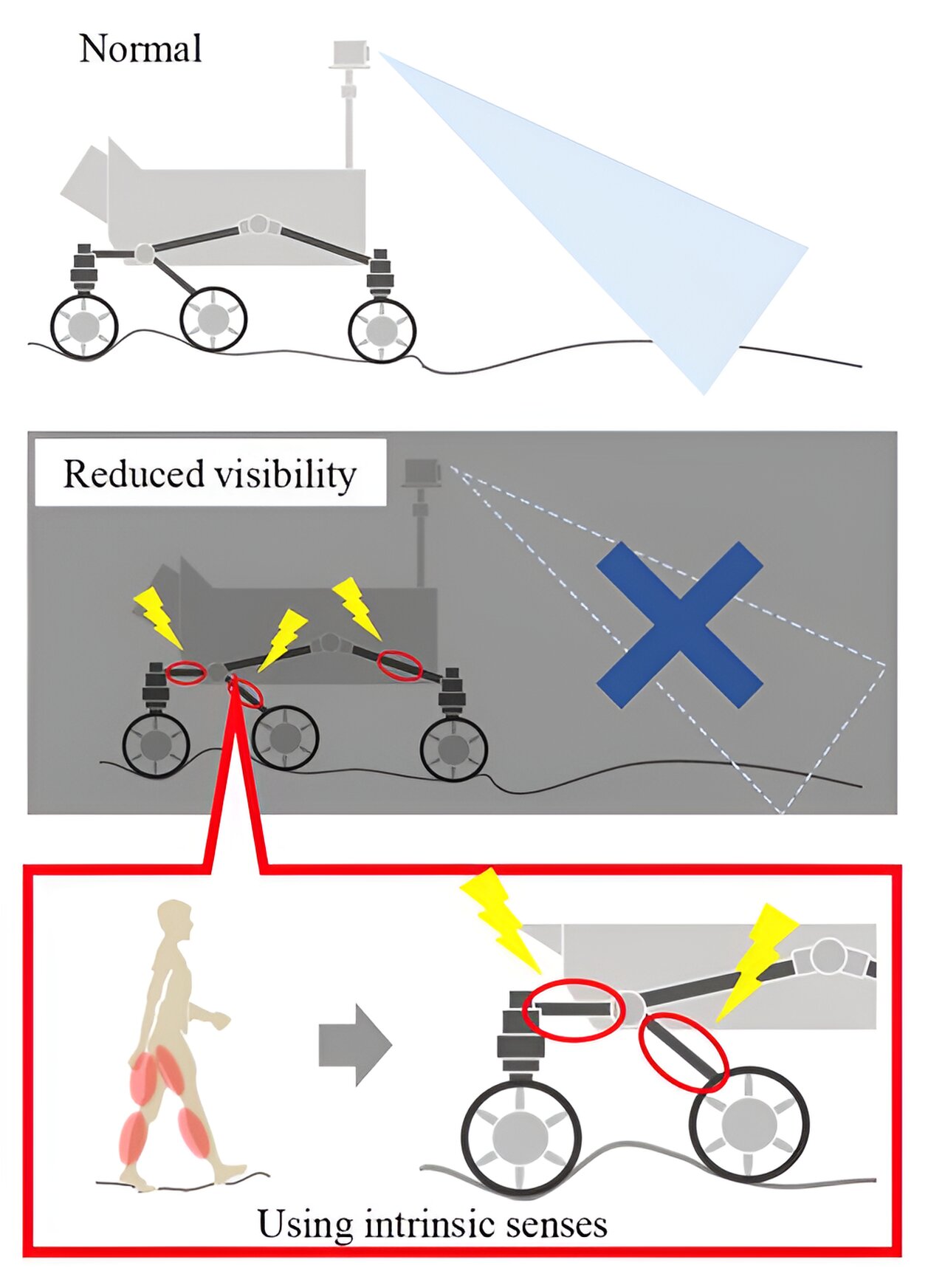
De manera similar a la forma en que los músculos humanos detectan el estado de un cuerpo en movimiento, el estado de deslizamiento de los rovers se puede determinar detectando la deformación de su estructura. Esta tecnología se puede utilizar para evitar que los vehículos se deslicen. Fuente de la imagen: Kojiro Iizuka del Instituto de Tecnología Shibaura
Debido a las condiciones hostiles de los entornos extraterrestres, las naves espaciales no tripuladas desempeñan un papel crucial en la exploración de planetas y lunas. Los vehículos de reconocimiento lunar y de Marte de la NASA han contribuido en gran medida a nuestra comprensión de estos objetos extraterrestres. Las superficies planetarias suelen representar paisajes difíciles con acantilados, cráteres y dunas de arena.
Más importante aún, la presencia de regolito, las finas partículas que cubren estas superficies, plantea un gran desafío para el movimiento del vehículo. Los rovers que resbalen sobre estas superficies sueltas pueden obstaculizar su avance e incluso poner en peligro sus misiones.
Se han explorado varios métodos, principalmente basados en datos visuales de cámaras, para detectar el estado de desplazamiento o deslizamiento de los rovers. Sin embargo, estos métodos tienen limitaciones porque pueden tener dificultades para distinguir entre diferentes características del terreno, como distinguir entre rocas sueltas y arena. La solución a este problema es que los rovers obtengan información sobre la tracción en cada rueda. De esta manera, el rover puede detectar más rápidamente su condición de viaje y corregir su posición para evitar patinar.
Para lograr esto, el Profesor Kojiro Iizuka del Departamento de Instrumentación y Sistemas de Control de la Escuela de Ingeniería y Ciencias de Sistemas del Instituto de Tecnología Shibura (SIT), Japón, y el Dr. Kohei Inaba, también de SIT, desarrollaron recientemente un nuevo sistema que permite al rover detectar su estado de viaje cambiando la forma de su casco.
«Nuestra inspiración surgió de cómo los humanos detectan su estado de viaje basándose en la tensión muscular mientras caminan. Nuestro objetivo es desarrollar un sistema similar que reconozca el estado de viaje basándose en la deformación de la forma de una estructura», explica el profesor Iizuka. fue su estudio Publicado en la revista Sensores remotos.
Los músculos del cuerpo humano contienen fibras musculares especiales llamadas fibras de cadena nuclear y fibras del saco nuclear, que ayudan a detectar el estado del cuerpo durante el viaje. Las fibras de la cadena nuclear detectan el desplazamiento de la tensión en los músculos y ayudan a determinar la posición estable del cuerpo. Por otro lado, las fibras del saco nuclear detectan la rapidez con la que se estiran las fibras musculares y ayudan a detectar el estado dinámico del cuerpo.
Haciendo paralelos con los músculos humanos, los investigadores clasificaron el cambio de forma de la estructura del rover, que se manifiesta como tensión, en dos categorías: desplazamiento de tensión y cambio vibratorio en la tensión. Estudiaron datos de desplazamiento de deformación mediante análisis de fibras de cadena nuclear y velocidad de deformación, como el análisis de fibras de bolsas nucleares.
El análisis de las fibras de la cadena nuclear reveló que las fuerzas que actúan verticalmente y en la dirección del movimiento del vehículo cambian con la tensión. Por lo tanto, monitorear los cambios de presión puede permitir la detección de cambios de fuerza, lo que en última instancia indica el estado de viaje del vehículo.
Además, al analizar las bolsas nucleares, los investigadores descubrieron que la tasa de cambio de tensión puede medir eficazmente el nivel de deslizamiento y los ajustes posteriores al estado de marcha del vehículo. Utilizando estos datos, el sistema puede determinar el estado del vehículo en tiempo real, permitiendo así que el vehículo realice maniobras básicas para evitar posibles accidentes por derrape.
El estudio también confirma las capacidades del sistema para detectar obstáculos ambientales, como rocas y piedras, al tiempo que destaca su capacidad para mejorar la seguridad y la eficiencia de las operaciones de los vehículos.
Destacando la importancia de este estudio, el profesor Iizuka dice: «Al planificar la trayectoria de un rover, se deben tener en cuenta las experiencias de este estudio para garantizar que los rovers puedan viajar con seguridad. Estos resultados representan el primer paso hacia la integración de elementos de la función biológica. en la detección de movimiento». Creemos que «nuestro enfoque también será eficaz para los vehículos aéreos no tripulados y la conducción automatizada en el futuro».
En conclusión, este innovador estudio representa un paso importante hacia la mejora de la seguridad y eficacia de las misiones de rovers, prometiendo avances en nuestra exploración de planetas y otros cuerpos celestes.
más información:
Kojiro Iizuka et al., Estimación del deslizamiento utilizando datos de tensión variacional para la estructura de vehículos lunares que viajan sobre suelo suelto, Sensores remotos (2023). doi: 10.3390/rs15174270
Proporcionado por el Instituto de Tecnología Shibaura
La frase: Un nuevo sistema antideslizante para vehículos no tripulados (15 de noviembre de 2023) Obtenido el 15 de noviembre de 2023 de https://phys.org/news/2023-11-unmanned-rovers.html
Este documento está sujeto a derechos de autor. Sin perjuicio de cualquier trato justo con fines de estudio o investigación privados, ninguna parte puede reproducirse sin permiso por escrito. El contenido se proporciona únicamente con fines informativos.

«Propenso a ataques de apatía. Explorador de aspirantes. Analista ávido. Fanático de Internet. Comunicador»
More Stories
Una nueva forma de reciclar plástico captura carbono
La Asociación Estadounidense del Pulmón se centra en abordar los desafíos del calor extremo y el asma
Recuperación científica en el telescopio espacial Hubble después de un problema de rotación