



Cuando el bebé guepardo del MIT ejecutó perfectamente una voltereta hacia atrás en «The Tonight Show Starring Jimmy Fallon», la audiencia rugió y aplaudió salvajemente. Si esta máquina, que también saltaba por el escenario como un perro de exhibición y se estiraba en varias direcciones diferentes, podía realizar una maniobra tan complicada, una maniobra imposible para la mayoría de los humanos, entonces debería ser fácil lograr que realice todo tipo de tareas cotidianas. tareas.
O al menos eso es lo que pensaba la mayoría de la gente. De hecho, el algoritmo de control para la voltereta hacia atrás es sorprendentemente simple, dice Sangbai Kim, director del Laboratorio de Biorobótica y profesor de ingeniería mecánica en el MIT. La voltereta hacia atrás es básica en comparación con una miríada de comportamientos humanos aparentemente tan fáciles como sostener una taza o mover la comida en la boca para masticar, que no solo requieren circuitos de retroalimentación más complejos, sino que también se comprenden mal porque los humanos los realizan automáticamente de acuerdo con procesos subconscientes. .
“A menudo es muy difícil y complejo lograr tareas robóticas que nos parecen fáciles”, dice Kim. “Tendemos a pensar en la dificultad de una tarea en base a criterios humanos”.
Ingrese a la clase de Kim, 2.74 (Robótica bioinspirada).
Según Kim, los investigadores deben comprender este sesgo cognitivo, esta tendencia hacia el antropomorfismo, para comenzar a desarrollar robots que puedan ayudar a los humanos con sus movimientos corporales. Si bien el interés de investigación de Kim es construir robots que puedan ayudar a las personas, como los ancianos en la clase superior con menos jóvenes para realizar los servicios, tal progreso no es posible incluso sin una comprensión de la biología y la biomecánica y lo poco que las entendemos. nuestros movimientos diarios.
Kim dice: «Una de las cosas importantes que los estudiantes deben aprender en esta clase no es necesariamente entender cómo movemos nuestros cuerpos, sino el hecho de que no entendemos cómo nos movemos. Uno de nuestros objetivos finales en robótica es desarrollar robots que ayuden los ancianos imitando cómo usamos nuestros brazos y piernas, pero si no se da cuenta de lo poco que sabemos sobre cómo nos movemos, ni siquiera podemos comenzar a abordar este problema».
La primera mitad de la clase, que consta de 50 o menos estudiantes de último año y graduados, se dedica a la biología y la biomecánica. Frente a lo poco que sabemos sobre los procesos inconscientes que permiten a los humanos interactuar con su entorno, dice Kim, los estudiantes tienen una sensación de asombro.
«Durante la conferencia, los estudiantes ven sus manos como un sistema robótico, cómo se mueven y cómo funcionan. Enseñar cómo nos movemos y cómo crear un comportamiento similar en los robots, entendiendo ambos mundos, es intrínsecamente interesante», dice Kim. .No sabía sobre esto.”
«Esta es la fuerza impulsora de toda la clase», agrega. «Así es como pensamos y nos divertimos».
Una de las cosas más sorprendentes que aprendió en 2.74 tiene que ver con cómo caminan los humanos, dice Roberto Polli, quien está en su segundo año de la maestría.
“Caminar es esencialmente un descenso continuo, con el centro de masa del cuerpo cayendo hacia delante como un péndulo invertido”, dice Pauli, cuyo equipo ha desarrollado un robot de 2,74 llamado Chickenbot 9000. “Esto significa que nuestra velocidad máxima al caminar está determinada aproximadamente por la longitud y la gravedad de nuestras piernas, no por nuestra condición física o resistencia en general”.
Los proyectos de investigación indican que 2.74 estudiantes que inician la segunda mitad del semestre identifican comportamientos biológicos muy específicos para el estudio y buscan utilizar el modelo más simple posible. Por ejemplo, pueden verificar dónde debe ubicarse una batería u otra carga en un robot saltador para lograr el salto más alto.
A través de este proceso, los estudiantes pueden comparar lo que han aprendido sobre biología con robótica a medida que desarrollan y ajustan hipótesis, ideas que provienen de la biología pero que deben reconfigurarse en el contexto de la robótica, dice Kim.
«Si ves a un canguro saltando, puedes decir: ¿Cómo puede un canguro saltar tan alto? No puedo probar con el animal, y realmente necesitas pensarlo tres veces. No tenemos el mismo tipo de músculos». en un robot, ¿verdad? No tenemos el mismo tipo de tendones. Entonces, tenemos que volver a empaquetar la hipótesis en el contexto de la robótica», dice Kim. “La mitad de la clase trata sobre biología y biomecánica para que los estudiantes puedan realmente comparar los músculos con los motores eléctricos, las computadoras con los cerebros y los algoritmos informáticos con el control del movimiento”.
Polley dice que la clase lo ayudó a aprender «un enfoque sistemático para aplicar conceptos biológicos a sistemas mecánicos».
«La biomimética no es solo ‘copiemos este diseño que encontramos en la naturaleza y veamos qué tan bien funciona en un robot’”, dice. «Se trata de extraer principios útiles de los sistemas naturales para resolver desafíos como la manipulación y el movimiento en nuevos e interesantes maneras.»
Jess Han, estudiante de doctorado de primer año de maestría, señala que ella y sus colegas investigadores «deben tener cuidado y pensar críticamente sobre los aspectos de la biología que estamos tratando de simular con nuestros robots», porque la naturaleza no siempre proporciona la mejor diseño
«La selección natural permite que las cosas ‘suficientemente buenas’ sobrevivan en lugar de seleccionar la solución perfecta», dice Han, quien co-creó el Suni-Bot, que lleva el nombre del gimnasta olímpico Sonny Lee. «Si copiamos la biología sin pensar, podemos diseñar robots que no sean tan eficientes como podrían ser o que no aprovechen al máximo el potencial de la tecnología que tenemos».
Los estudiantes estudian y experimentan con robots y simulaciones por computadora. Kim dice que el 70 por ciento del código de clase; Los datos de las simulaciones dinámicas y los resultados de la instrumentación se utilizan para sacar una conclusión científica.
Hallazgos como este podrían iluminar pequeñas áreas de la enorme y desconocida extensión de comportamientos subconscientes detrás de gran parte del movimiento humano, dice Kim.
«No importa cómo estudiemos nuestro cuerpo humano, no creo que podamos resolver la gran pregunta de cómo nos movemos», dice. «En cambio, construyes un sistema automatizado y luego experimentas con A, B, C. Luego, si encuentras algo viable, dices: ‘Eh, así debería ser como lo controlamos'». [a particular movement]. «
Incluso los investigadores de robótica más avanzados «no saben qué tipo de robot ayudará a las personas en este momento», dice Kim. «Simplemente construimos tecnología de componentes».
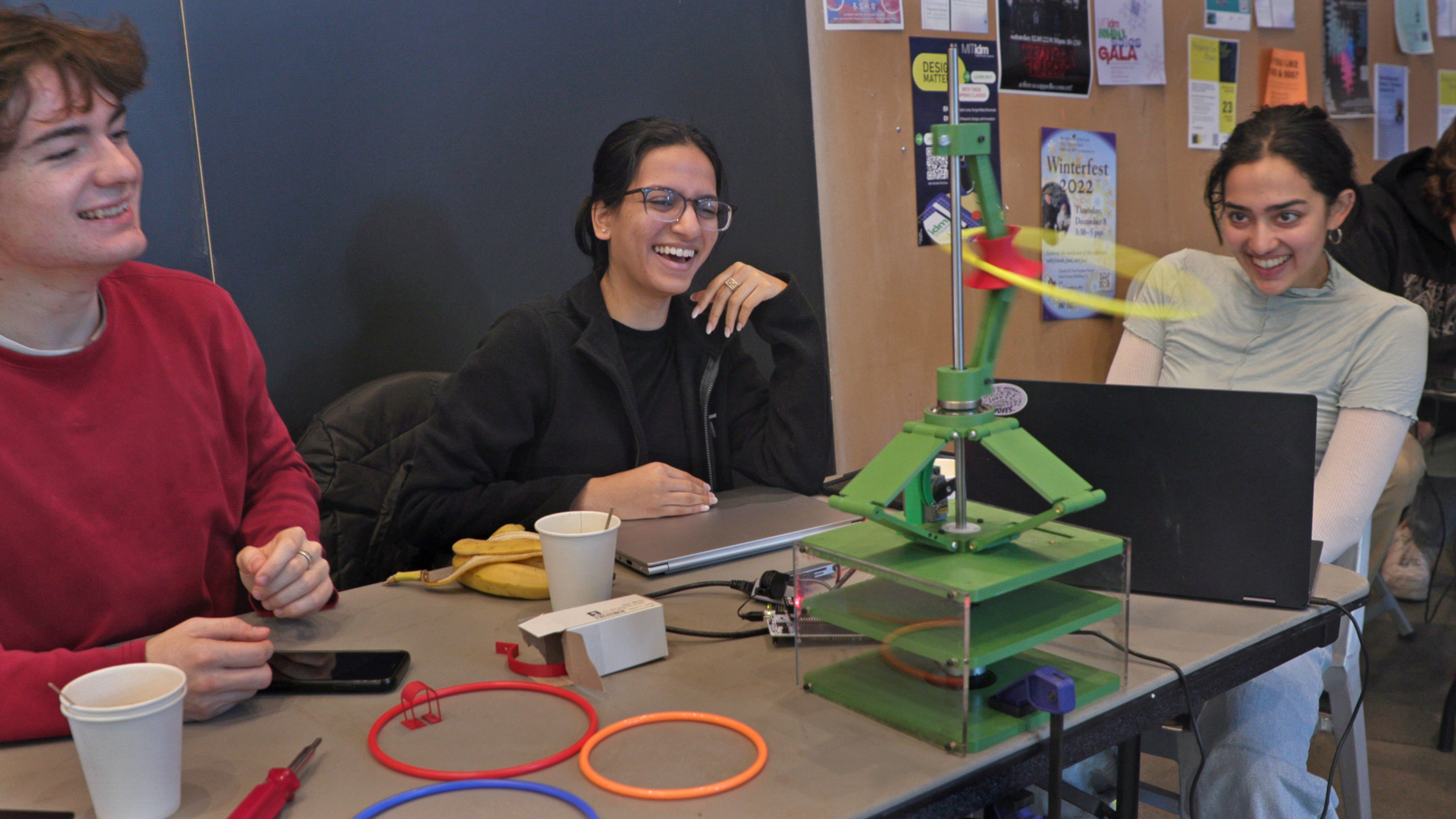
Mientras tanto, la clase de bio-robots de Kim, inspirada en Kim, proporciona un caldo de cultivo para la experimentación.
«Los estudiantes sin duda estaban encariñados con sus robots», dice Polley. “Nos organizamos en pequeños grupos para el proyecto final, por lo que todos estaban trabajando en algún aspecto de la biomimética que les interesaba personalmente. un trampolín Como estudiante de ingeniería mecánica, creo que estaba más entusiasmado con el lado «manus» de «man et manus» [‘mind and hand,” MIT’s motto]Así que los laboratorios que involucraron la construcción y el control de las piernas del robot, así como el proyecto final, fueron definitivamente la parte más interesante de la clase”.

«Defensor de la Web. Geek de la comida galardonado. Incapaz de escribir con guantes de boxeo puestos. Apasionado jugador».
More Stories
Samsung está lanzando una nueva función S24 para impulsar los teléfonos Galaxy más antiguos
El centro de transmisión de TV 4K de Apple ha caído a su precio más bajo en Australia: ahora solo AU $ 182,25
Las nuevas filtraciones de Google Pixel 8a muestran un dispositivo impulsado por IA con un diseño resistente