




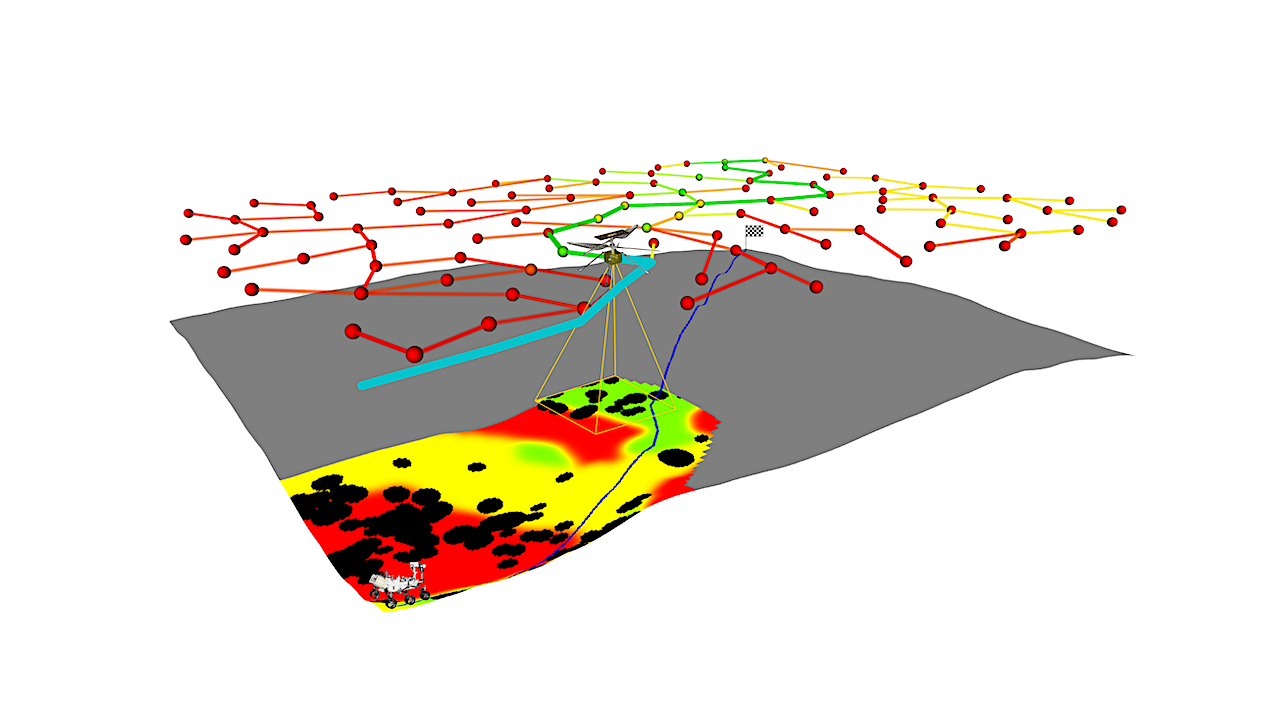
Una explicación de nuestro problema y enfoque. El robot esclavo (como el rover, abajo) debe atravesar un espacio desconocido para alcanzar un objetivo (arriba) y al mismo tiempo minimizar el costo de cruzar (color del suelo, de rojo = alto a verde = bajo). El objetivo es que un robot de reconocimiento (como una pequeña nave espacial) explore la escena para que la trayectoria del rastreador sea perfecta. Nuestro enfoque genera un camino optimista para el seguidor (azul) que guía el IPP de reconocimiento. Para mayor claridad, las muestras IPP dispersas se muestran coloreadas según la ganancia de información (de rojo = bajo a verde = alto), con la ruta pasada (verde azulado) y la ruta planificada actualmente (verde) del navegador. —cs.RO
La capacidad de atravesar un entorno desconocido es fundamental para las operaciones de robótica autónoma. Sin embargo, debido a las capacidades de detección limitadas y las limitaciones del sistema, abordar este problema utilizando un solo agente robótico puede resultar lento, costoso e inseguro.
Por ejemplo, en las misiones de exploración planetaria, se debe minimizar a toda costa el desgaste de las ruedas del rover debido al terreno abrasivo, ya que las reparaciones no son posibles. Por otro lado, el uso de un robot de exploración como un pequeño vehículo aéreo (MAV) tiene el potencial de reducir el desgaste y los costos de tiempo y aumentar la seguridad del robot de seguimiento.
Este trabajo propone un nuevo marco cooperativo que permite al explorador (por ejemplo, una nave espacial) explorar de manera eficiente el camino de menor costo para que el seguidor (por ejemplo, un rover) alcance el objetivo. Derivamos garantías teóricas para nuestro algoritmo y demostramos que el algoritmo siempre termina, siempre encuentra una ruta óptima si existe y termina temprano cuando se demuestra que la ruta encontrada es óptima o inviable.
Demostramos a través de una evaluación experimental integral que las garantías se mantienen en la práctica y que nuestro algoritmo es un 22,5 % más rápido para encontrar la ruta óptima y un 15 % más rápido para terminar en comparación con los métodos existentes.
Friedrich M. Rockenbauer, Jayeong Lim, Markus G. Müller, Roland Siegwart, Lukas Schmid
Comentarios: 8 páginas, 9 figuras, el código estará disponible en esta URL https
Temas: Robótica (cs.RO)
Cite lo siguiente: arXiv:2406.05313 [cs.RO] (O arXiv:2406.05313v2 [cs.RO] (para esta versión)
https://doi.org/10.48550/arXiv.2406.05313
Enfócate para aprender más
Fecha de envío
De: Jae Young Lim
[v1] Sábado 8 de junio de 2024, 01:10:22 UTC (12 076 KB)
[v2] Miércoles 12 de junio de 2024 11:41:17 UTC (12.077 KB)
https://arxiv.org/abs/2406.05313
Astrobiología
More Stories
El jefe de la Agencia Espacial de EE.UU. quiere hablar con China sobre la basura espacial
Búsqueda de gemas: caracterización de seis planetas gigantes que orbitan enanas frías
La Administración Federal de Aviación de EE. UU. ha puesto en tierra los cohetes Falcon 9 de SpaceX en espera de una investigación sobre un raro accidente de aterrizaje frente a la costa.